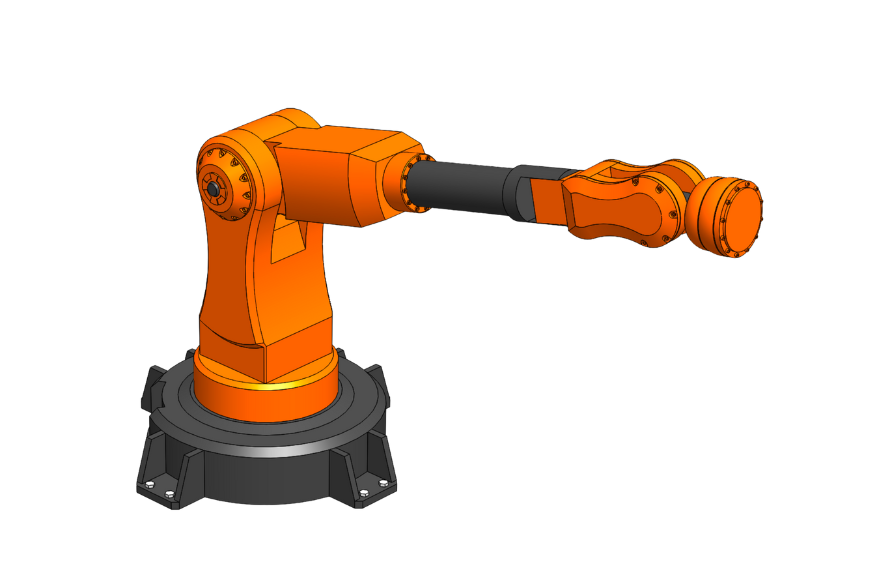
Los robots esféricos, también conocidos como robots polares, utilizan el sistema de coordenadas polares tridimensionales r, θ y φ.
En lugar de tener una zona de trabajo en forma de prisma rectangular, los robots polares tienen un alcance esférico.
Este tipo de robot es muy útil en aplicaciones que requieren movimientos flexibles, como ensamblaje, soldadura, manipulación de objetos y exploración espacial.
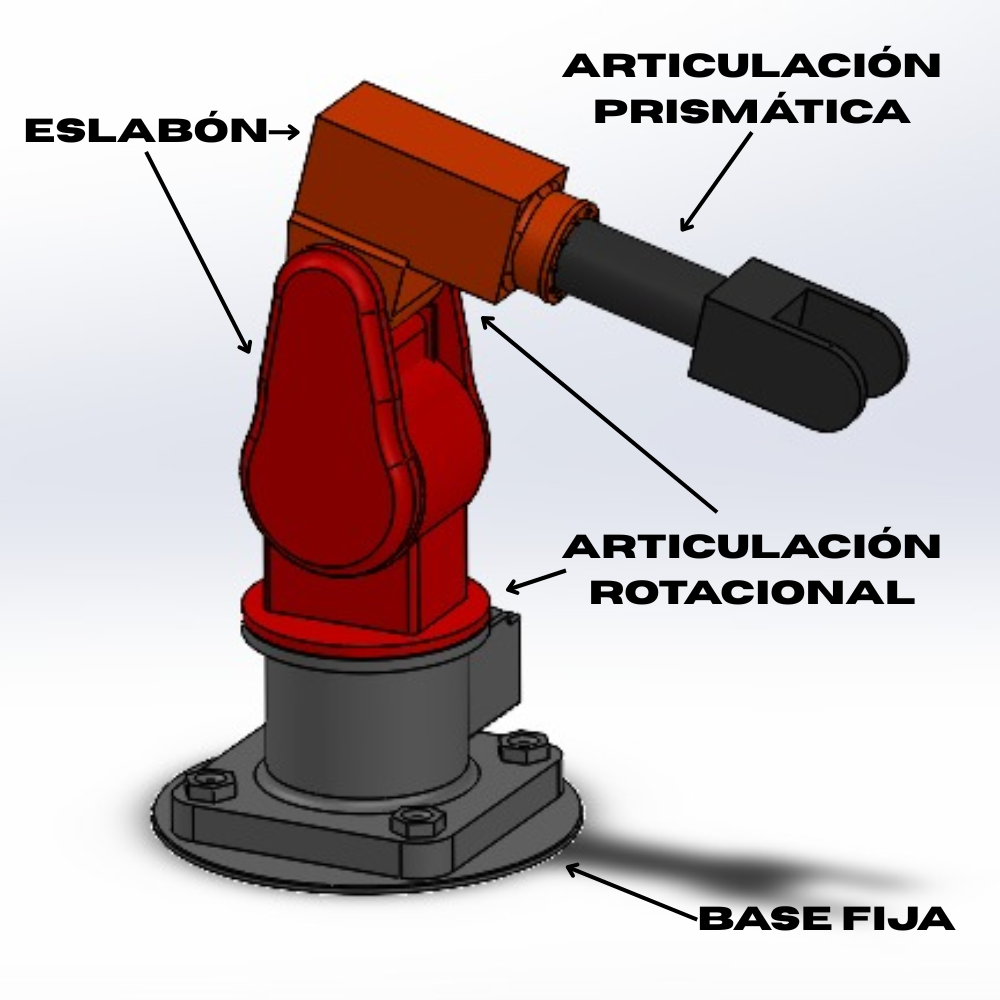
Estructura
Este tipo de robot se compone detres grados de libertad (GDL)
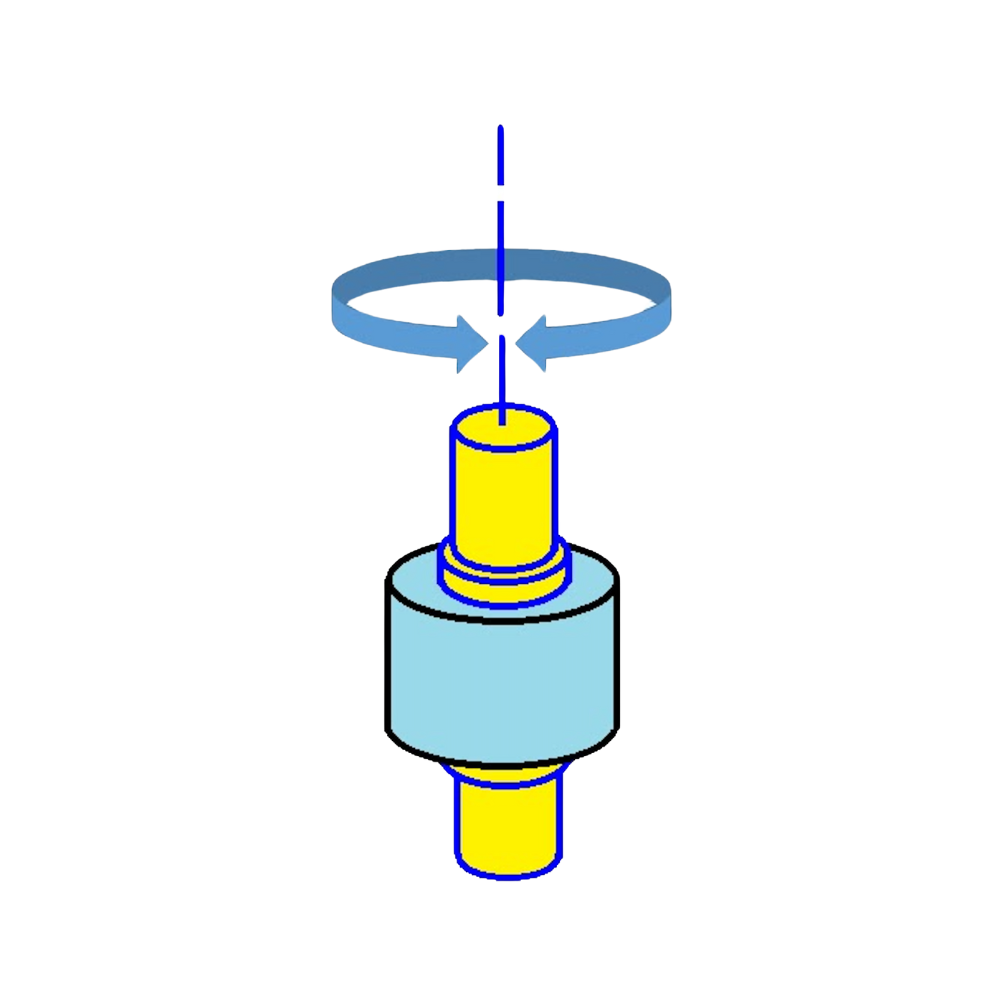
Dos articulaciones rotacionales que permiten cambios de dirección.
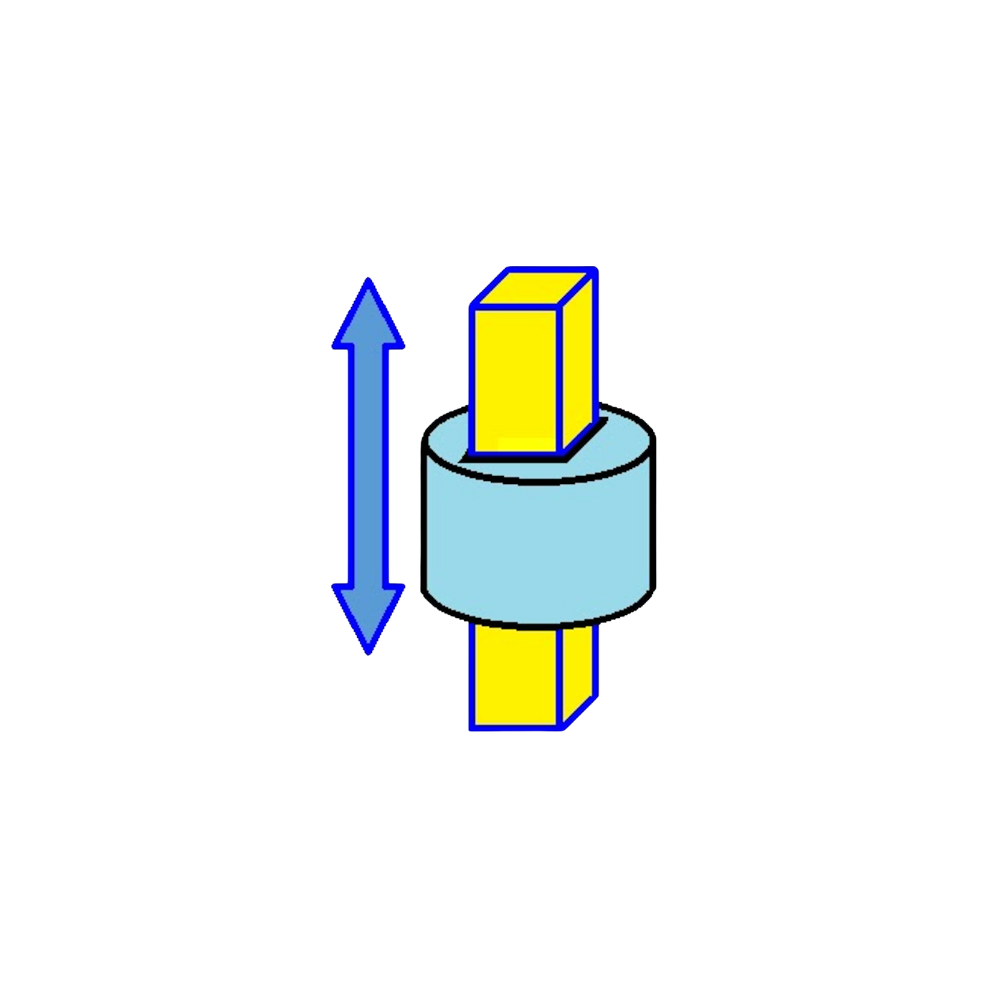
Una articulación prismática que permite desplazamientos lineales.
Características de los robots esféricos
Tres Grados de Libertad (3 GDL)
• Rotación en la base (Eje Z)
• Rotación en el brazo (Eje Y o X)
• Movimiento prismático (Radial)
Espacio de trabajo esférico
Puede alcanzar puntos en una zona con forma de cúpula o semiesfera.
Composición básica
• Una base fija con motor rotacional.
• Un brazo extensible con articulaciones rotatorias.
• Un efector final que interactúa con el entorno.
Mayor flexibilidad que los robots cartesianos
Su diseño permite moverse en ángulos variados, lo que los hace ideales para tareas que requieren orientación precisa.
Aplicaciones de losrobots esféricos
Industria manufacturera
Ensamblaje automatizado.
Manipulación de piezas en fábricas.
Exploración espacial y submarina
Brazos robóticos en rovers marcianos o submarinos. Operaciones en entornos de difícil acceso.
Robótica médica
Cirugía robótica de alta precisión.
Manipulación de herramientas quirúrgicas.
Industria militar y seguridad
Uso en drones y robots de vigilancia con cámaras montadas
Ventajas de los robots esféricos
Mayor alcance y flexibilidad
Gracias a su diseño, puede operar en un espacio tridimensional más amplio.
Posibilidad de movimientos más naturales
Ideal para tareas que requieren precisión angular y ajustes finos.
Ahorro de espacio
Puede alcanzar objetos sin necesidad de moverse en un eje lineal largo.
Eficiencia energética
Al minimizar desplazamientos innecesarios, optimiza el consumo de energía.
Desventajas de los robots esféricos
Mayor complejidad en la programación y control
Requiere algoritmos más avanzados para calcular trayectorias.
Menos precisión en movimientos lineales
Comparado con un robot cartesiano, su precisión en desplazamientos rectos es menor.
Mantenimiento y costos más elevados
Debido a la combinación de motores rotacionales y actuadores prismáticos.
Unlock the Potential of AI and Robotics with Artifice
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua